Perseverance – In questi giorni, il rover Perseverance della Nasa è impegnato nella raccolta di un campione di roccia marziana, il primo di una esclusiva collezione geologica che le future missioni di Mars Sample Return riporteranno sulla Terra per esami di laboratorio approfonditi.
A un anno dal lancio della missione Mars 2020, avvenuto il 30 luglio 2020, e neanche sei mesi dall’arrivo sulla superficie del Pianeta rosso, il rover Perseverance è già indaffarato con il suo primo compito di foratura del terreno marziano, nella regione chiamata Cratered Floor Fractured Rough del cratere Jezero. Per la scienza, ovviamente: lo scopo è raccogliere il primo di 38 campioni del suolo di Marte che, tra circa dieci anni, partiranno alla volta del nostro pianeta. Mars 2020 è infatti il primo segmento del programma Mars Sample Return che porterà sulla Terra, per la prima volta, esemplari rappresentativi di un altro pianeta, da analizzare in laboratorio alla ricerca di tracce di vita.
Per saperne di più su questa prima operazione di foratura e raccolta di campioni, in corso al momento su Marte, Media Inaf ha raggiunto a Copenaghen, dove vive e lavora, Marco Merusi, membro del team dello strumento Mastcam-Z a bordo di Perseverance. Originario di Collecchio (Parma), laurea triennale in astronomia presso l’Università di Bologna e magistrale all’Università di Padova, con Erasmus a Liegi e tesi in planetologia su Mercurio e i dati della sonda Messenger, dopo un tirocinio presso il Laboratoire atmosphères, milieux, observations spatiales vicino Parigi, dove analizza immagini provenienti dal Trace Gas Orbiter della missione ExoMars, si trasferisce in Danimarca a inizio 2020 per iniziare un dottorato al Niels Bohr Institute di Copenhagen, entrando nel team della missione Mars 2020 all’interno del sottogruppo di calibrazione di Mastcam-Z.
Dottor Merusi, a che punto è la missione di Perseverance su Marte?
«La missione è all’inizio. Sono passati solo 160 sol (i giorni marziani) ma ci sono già molti risultati preliminari: osservazioni e spettri ottenuti con tutti gli strumenti. Ha già fatto esperimenti anche Moxie, forse il più avveniristico degli strumenti, che deve trasformare anidride carbonica in ossigeno. Ma naturalmente una delle parti principali della missione è la raccolta di campioni da riportare sulla Terra, il cui primo compito è iniziato questa settimana».
Dove si trova adesso il rover?
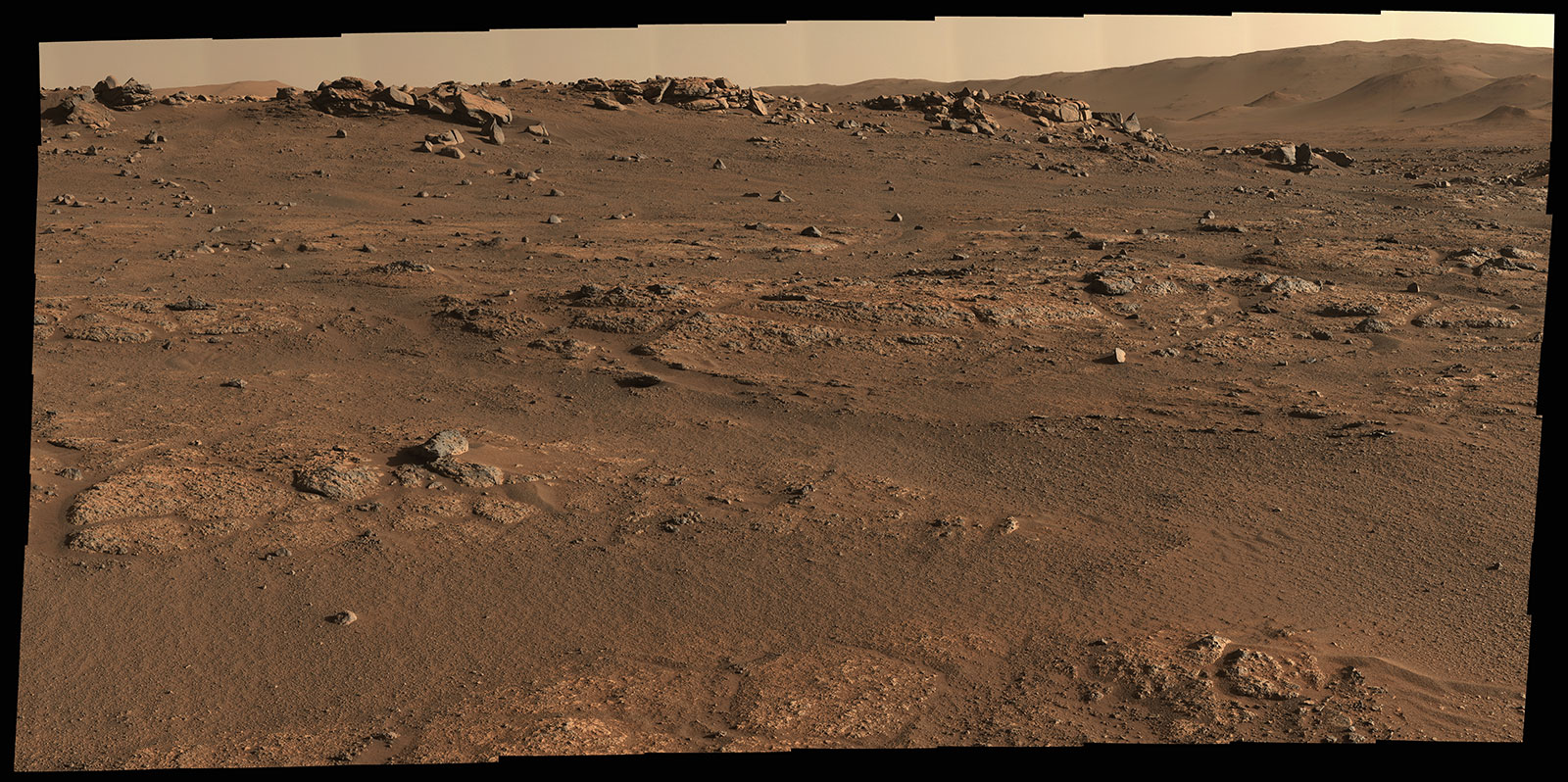
«In un’immagine che risale a circa due settimane fa, diversi metri dal luogo dove si trova adesso, si vede un ovale bianco: è la zona in cui si era deciso di cercare ed effettuare la prima estrazione. Si tratta in realtà di una serie di immagini scattate con Mastcam-Z in tre colori e poi combinate per creare un mosaico. Successivamente, il rover si è mosso in direzione sud verso quell’area, nella regione occidentale del cratere Jezero, e ha realizzato un altro mosaico con Mastcam-Z, pubblicato ieri. In quest’ultima immagine [in alto a destra in questo articolo, ndr] si vede una panoramica del terreno nelle immediate vicinanze, su cui sta procedendo con l’estrazione».

Panorama all’interno dell’unità geologica chiamata Cratered Floor Fractured Rough su Marte: l’ovale bianco indica la regione selezionata per la raccolta del primo campione. Il mosaico è stato realizzato a partire da cinque immagini scattate il 15 luglio dalla camera Mastcam-Z. Crediti: Nasa/Jpl-Caltech/Asu/Msss
Quando Perseverance è giunto sul sito selezionato per la prima foratura e raccolta, un paio di settimane fa, la Nasa aveva pubblicato un’altra foto molto curiosa che mostra una specie di tubo infilato nel terreno di Marte e che ha dato adito a una serie di speculazioni, in particolare su Twitter. Ce ne può parlare?
«Purtroppo non si tratta, come suggeriva una delle ipotesi più bizzarre, di una valvola di gonfiaggio e sgonfiaggio del pianeta, e nemmeno di una spada laser, l’ipotesi più gettonata! Quello che vediamo è assolutamente normale: il trapano al termine del braccio robotico di Perseverance è partito e arrivato su Marte con una punta che non era da usare. Serviva da protezione. Una volta che non ce n’era più bisogno, come previsto, il braccio si è piegato verso il terreno, la punta abrasiva ha scavato un buco ed è stata rilasciata lì, lasciando scoperta la parte interna del trapano».
Come funziona questo trapano?
«Il concetto è esattamente quello di un trapano normale: ha un incastro che rimane scoperto, e all’interno del rover, nella parte anteriore, c’è una “giostra” girevole che contiene una decina di punte per il trapano. Un paio sono punte di abrasione, servono a scavare la parte più esterna del terreno con impurità, sabbia, polvere, in modo da lasciare scoperta la parte più interna. Scavano qualche millimetro in profondità. Sembra incredibile, ma il tutto avviene in modo estremamente semplice. Le altre punte servono invece a bucare la roccia sottostante, dopo l’abrasione, e raccogliere i frammenti per riempire le varie provette con i campioni, nella “pancia” del rover».
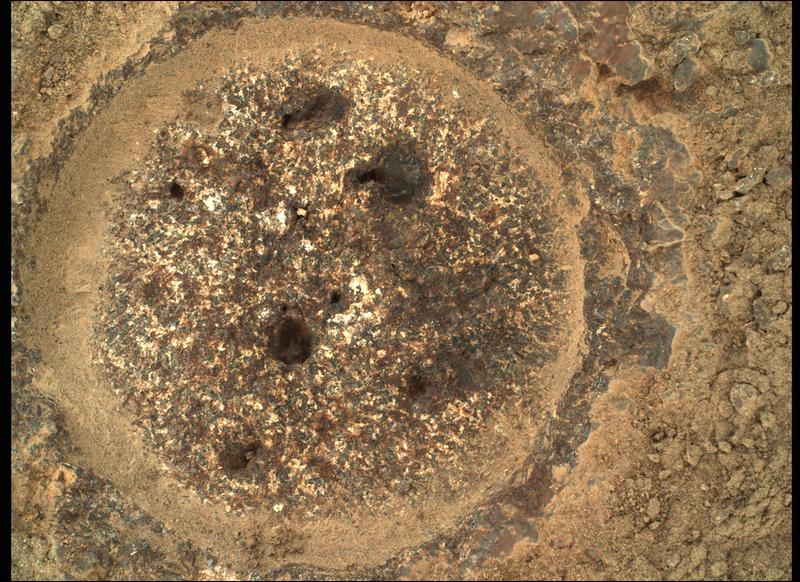
Immagine grezza del terreno marziano dopo la prima abrasione, realizzata dalla camera Watson dello strumento Sherloc, all’estremità del braccio meccanico del rover di Perseverance il 2 agosto 2021 (Sol 160, ora locale 12:49:39). Crediti: Nasa/Jpl-Caltech
Quando avrà luogo tutto ciò?
«Sul sito della Nasa ci sono già alcune immagini raw (grezze, in italiano) che mostrano il terreno dopo l’abrasione, dopo che è stata rimossa la parte più esterna. Quelli che sembrano buchi nell’immagine in realtà sono solo parti più scure. Il terreno è pronto per essere forato, nei prossimi giorni, con una punta di precisione, che serve sia a forare che estrarre i primi frammenti».
Il suo team partecipa a queste operazioni?
«Non direttamente. Noi ci occupiamo di calibrazione, però il nostro lavoro dà la possibilità di estrarre spettri di parti diverse di un minerale alla portata del rover, e nel caso in cui questo minerale sia particolarmente interessante e degno di essere studiato in laboratorio c’è la possibilità che venga selezionato per essere campionato. Aiutiamo sicuramente la procedura».
Parliamo di Mastcam-Z: cosa ha di speciale rispetto agli altri strumenti?
«Mastcam-Z è la fotocamera più completa a bordo del rover da un punto di vista fotografico: è la camera adibita alla fotografia. Si tratta di un’evoluzione della Mastcam a bordo del predecessore di Perseverance, il rover Curiosity, attivo ancora oggi su Marte. Questa però ha lo zoom (da cui la Z nel nome), uno zoom molto potente: può mettere a fuoco oggetti di pochi millimetri a distanza di alcuni metri, e oggetti di pochi centimetri a distanza di 100 metri. Come la precedente Mastcam, anche questa è stereoscopica, ovvero ha due sensori, due “occhi”, che nel caso di Mastcam-Z sono uguali, cambiano solo i filtri».
Qual è lo scopo di questa fotocamera?
«Lo scopo di Mastcam-Z è scattare immagini sia RGB che in tutti i suoi filtri, che coprono tutto lo spettro della luce visibile. Ci sono tante altre fotocamere a bordo di Perseverance, ognuna con specifici obiettivi scientifici. Mastcam-Z ha principalmente uno scopo scientifico – realizzare spettri delle rocce marziane – e uno paesaggistico – realizzare mosaici della superficie di Marte».
Come è entrato nel team di Mastcam-Z?
«Il team è composto da tanti gruppi negli Stati Uniti e alcuni in Europa, tra cui uno in Danimarca. I miei due supervisor danesi, Morten Madsen e Kjartan Kinch, avevano già lavorato per Curiosity e sono co-investigator di Perseverance: appena ho iniziato il dottorato, mi hanno subito portato nel team. Il target di calibrazione di Mastcam-Z è stato progettato, costruito e assemblato a Copenaghen dal Niels Bohr Institute».
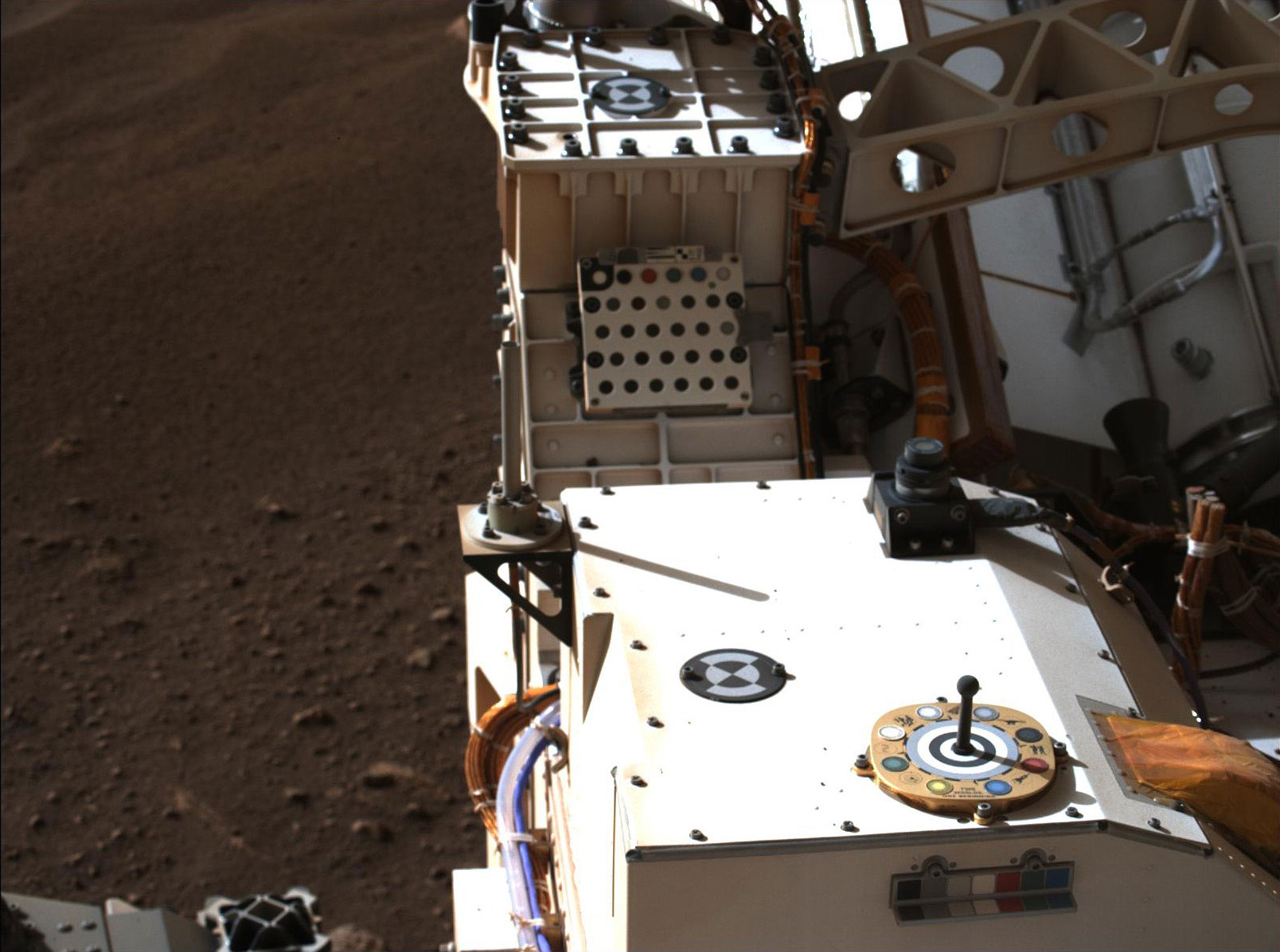
Il target primario di calibrazione di Mastcam-Z (in basso a destra) e, immediatamente sotto, in ombra, il target secondario. Crediti: Nasa/Jpl-Caltech/Asu/Msss/Nbi-Ucph
Cos’è un target di calibrazione?
«È un elemento montato sulla “schiena” del rover, visibile da Mastcam. C’è il target primario, formato da quattro anelli con la scala di grigio, otto cerchi colorati di ceramica e uno gnomone, che ci dà un’idea dell’altezza del Sole. E poi c’è un target secondario, sotto il primario, formato da sette quadrati colorati (con gli stessi colori del primario meno uno), che è praticamente sempre in ombra. Serve solo come conferma o convalida del target primario».
E a cosa serve?
«Quando il Sole è alto sull’orizzonte, di solito intorno al mezzogiorno marziano, si scatta una sequenza di immagini del target in tutti i filtri. Conoscendo il comportamento teorico del target in laboratorio, questo ci permette di calibrare gli spettri in modo che siano consistenti tra loro, tenendo conto di una serie di parametri tra cui l’ora del giorno, la posizione del Sole, la polvere, l’eventuale deterioramento tecnologico, considerato che si tratta di un mezzo robotico su un pianeta esposto al vento solare, praticamente senza protezione…».
Come funziona praticamente il lavoro di calibrazione?
«C’è una pipeline, in futuro diventerà molto più automatizzata. Al momento viene fatto a mano e a occhio, ma con precisione. Quello che faccio io è la calibrazione della “riflettanza” che in italiano è una parola curiosa. La camera ha 18 filtri su tutto lo spettro, e quando scatta foto di un certo obiettivo, le scatta in tutti i filtri. Noi cerchiamo l’indice di riflettanza, ovvero l’intensità con cui una certa roccia o una regione della roccia riflette la luce solare. Le immagini calibrate per la riflettanza servono per lo studio geologico e geofisico di Marte».
Come ha seguito il lancio della missione e l’arrivo su Marte?
«Quando sono arrivato a Copenaghen, il rover era già negli Stati Uniti e quasi completamente assemblato. Il lavoro, fino all’arrivo su Marte, è stato di pre-calibrazione: misurare i valori teorici in laboratorio e creare un modello per far sì che, una volta su Marte, la calibrazione avvenga nel modo più rapido possibile. Il lancio è stato emozionante. Tutti i membri del team danese che hanno lavorato all’assemblaggio, alla calibrazione, eccetera, più altri membri del team che si occupano di altri strumenti, si sono ritrovati tutti al Niels Bohr Institute per seguire il lancio con famiglie e amici. Per fortuna era il 30 luglio [2020, ndr] e le misure di quarantena non erano troppo restrittive. L’arrivo su Marte è stato l’opposto: l’ho seguito da casa, per via del nuovo lockdown, poi ci sono state tante videochiamate. Anche quello è stato emozionante: i miei futuri due anni e mezzo di dottorato dipendevano anche da quello!».

Marco Merusi, dottorando al Niels Bohr Institute dell’Università di Copenaghen e membro del team dello strumento Mastcam-Z su Perseverance, in laboratorio. Crediti: Morten Madsen
Qual è la parte più divertente di questo lavoro?
«Sicuramente i tanti momenti di leggerezza nei meeting e negli shift con i colleghi danesi e statunitensi che lavorano sulla missione. Sono persone eccezionali, e molti di loro sono anche tanto spiritosi, quindi capita a volte di lasciarsi andare a battute e risate durante meeting importanti, cosa che non mi aspettavo quando ho iniziato!».
E la più difficile?
«Senza scomodare la pandemia o la combo cibo+clima danese, direi… tutto! La maggior parte delle operazioni sono veramente complesse e la precisione è fondamentale, dopotutto da una missione su Marte non ci si può aspettare diversamente. Si imparano cose nuove ogni giorno, specialmente dagli errori! Inoltre, ogni giorno vengono pianificate decine di nuove attività per il rover, quindi non è facile riuscire a stare sempre al passo».
Come mai di tutti gli ambiti dell’astronomia ha scelto la planetologia?
«Dopo una parentesi all’università di Parma, a Bologna avevo scelto astronomia perché ero già appassionato. E di tutti gli ambiti, i pianeti del Sistema solare e gli esopianeti sono quello che mi ha sempre appassionato di più, per questo mi sono spostato a Padova per la laurea magistrale. È il campo che trovo più diretto, più sperimentale, meno teorico. Io sono meno teorico possibile: vanno bene i modelli ma voglio vedere risultati tangibili».
Come si sente oggi a essere parte del team di un rover operativo su Marte?
«È stato importante l’incontro con tante persone che mi hanno dato consigli e mi hanno appoggiato, non solo la mia famiglia e gli amici ma anche persone del campo, personaggi considerati illustri del campo, come Matt Taylor, che ho incontrato all’Open Day dell’Esa nel 2014 quando avevo solo 24 anni, avevo grandi speranze e ambizione. Anche da parte loro, inconsapevolmente, c’è stato un grande supporto. Ho avuto degli obiettivi fissi, ho tenuto duro, e questo è un ottimo inizio. Il dottorato non è l’arrivo, è l’inizio dell’attività di ricerca».
Quali sono i suoi progetti per il futuro?
«Nel breve periodo, tornerò in Italia tra poco per le vacanze. L’anno prossimo andrò negli Stati Uniti: poiché questa missione è principalmente della Nasa passerò sicuramente un periodo lì. Per il futuro “futuro”, siccome questa è una missione che durerà tanto e il ritorno delle provette inizierà solo tra molti anni, fra l’altro con una missione congiunta tra Nasa ed Esa, mi piacerebbe rimanere sempre in questo ambito. La calibrazione ha degli spin-off interessanti grazie al calibration target che ci dà indicazioni sulla polvere per esempio. Ci sono tante cose da studiare, anche con un taglio più astronomico, per esempio come variano gli spettri a seconda della posizione di Marte nell’orbita, e da perfezionare per future missioni. Anche quelle umane».
Le piacerebbe rientrare in Italia?
«Copenaghen è una città bella, fa un po’ freddino, non si mangia come in Italia, ovviamente! Nell’eventualità di poter continuare a lavorare in questo ambito, sarebbe bello anche tornare in Italia».
E su Marte ci andrebbe?
«Sono più un tipo da scienza in ufficio, da analisi di dati che vengono da lontano. Non sono così avventuroso».